

Ժամանակակից կոսմետիկ արտադրության արդյունաբերությունը բնութագրվում է բարդ բանաձևերով, որոնք հաճախ պարունակում են ոչ Նյուտոնյան հեղուկներ: Այս նյութերի բնորոշ ռեոլոգիական վարքագիծը, ինչպիսիք են նոսրացումը և թիքսոտրոպիան, լուրջ մարտահրավերներ են ներկայացնում ավանդական արտադրական մեթոդաբանությունների համար, ինչը հանգեցնում է խմբաքանակից խմբաքանակ անհամապատասխանության, հումքի մեծ կորստի և շահագործման անարդյունավետության կարևորագույն գործընթացներում, ինչպիսիք են պոմպավորումը և խառնումը: Ավանդական որակի վերահսկման մեթոդները, որոնք հիմնված են ռեակտիվ, ոչ գծային մածուցիկության չափումների վրա, հիմնարարորեն անբավարար են այս հեղուկների դինամիկ վարքագիծը արձանագրելու համար արտադրության պայմաններում:

I. Ռեոլոգիա և հեղուկային դինամիկա կոսմետիկայի արտադրության մեջ
Կոսմետիկայի արտադրությունը նրբերանգային գործընթաց է, որտեղ հեղուկի ֆիզիկական հատկությունները գերակա են: Այս հատկությունների խորը ըմբռնումը նախապայման է գործընթացի օպտիմալացման վերաբերյալ ցանկացած իմաստալից քննարկման համար: Կոսմետիկայի հեղուկային դինամիկան չի կարգավորվում պարզ հարաբերություններով, ինչը դրանք հիմնարար կերպով տարբերում է Նյուտոնյան հեղուկներից, ինչպիսին է ջուրը:
1.1Մածուցիկություն և ռեոլոգիա
Մածուցիկությունը հեղուկի կիրառվող լարվածության նկատմամբ դիմադրության չափանիշ է: Պարզ Նյուտոնյան հեղուկների համար այս հատկությունը հաստատուն է և կարող է բնութագրվել մեկ արժեքով: Այնուամենայնիվ, կոսմետիկ բանաձևերը հազվադեպ են այսքան պարզ: Լոսյոնների, կրեմների և շամպունների մեծ մասը դասակարգվում է որպես ոչ Նյուտոնյան հեղուկներ, որոնց հոսքի դիմադրությունը փոխվում է կիրառվող ուժի (կտրման) մեծության հետ մեկտեղ:
Ռեոլոգիան այս ոլորտի ավելի համապարփակ և կարևորագույն առարկան է։ Այն հեղուկների, գելերի և կիսապինդ նյութերի հոսքի և դեֆորմացիայի ուսումնասիրությունն է։ Մեկ տվյալը բավարար չէ ապրանքի վարքագիծը կանխատեսելու համար, երբ այն մղվում է, խառնվում և լցվում։ Ապրանքի ռեոլոգիական բնութագրերը անմիջականորեն ազդում են դրա զգայական հատկանիշների, փաթեթավորման մեջ երկարատև կայունության և ֆունկցիոնալ կատարողականի վրա։ Օրինակ, կրեմի մածուցիկությունը որոշում է դրա մաշկի վրա տարածվելու ունակությունը, իսկ շամպունի կոնսիստենցիան ազդում է սպառողի կողմից շշից բաշխվող քանակի վրա։
1.2Ոչ Նյուտոնյան հեղուկներ և դրանց արտադրության մարտահրավերներ
Կոսմետիկ արտադրության բարդությունը բխում է ներգրավված հեղուկների բազմազան ռեոլոգիական վարքագծից: Այս վարքագծերի հասկացումը կարևոր է արտադրական հիմքում ընկած մարտահրավերները լուծելու համար:
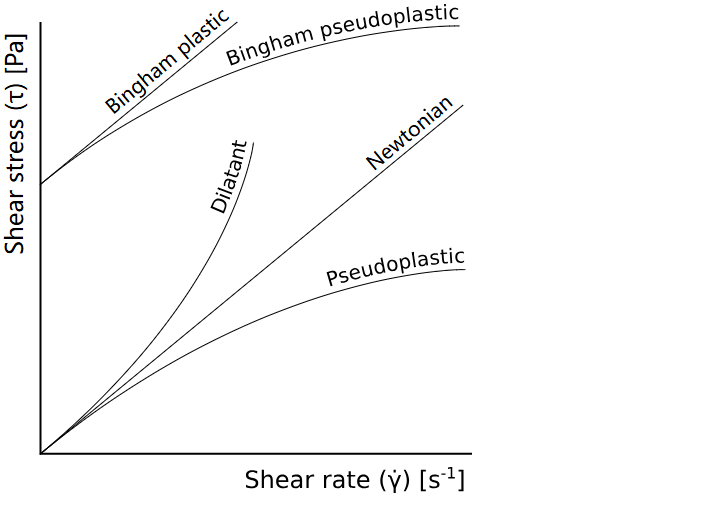
Պսևդոպլաստիկություն (կտրվածքի նոսրացում):Սա ժամանակից անկախ հատկություն է, որտեղ հեղուկի ակնհայտ մածուցիկությունը նվազում է սղման արագության աճին զուգընթաց: Շատ կոսմետիկ էմուլսիաներ և լոսյոններ ցուցաբերում են այս վարքագիծը, ինչը ցանկալի է այն արտադրանքի համար, որոնք պետք է լինեն խիտ հանգստի վիճակում, բայց քսելիս դառնան քսվող կամ հոսուն:
Թիքսոտրոպիա։Սա ժամանակից կախված կտրվածքի նոսրացման հատկություն է: Թիքսոտրոպ հեղուկները, ինչպես որոշ գելեր և կոլոիդային սուսպենզիաներ, ժամանակի ընթացքում դառնում են պակաս մածուցիկ, երբ խառնվում կամ կտրվում են, և որոշակի ժամանակ է պահանջվում իրենց սկզբնական, ավելի մածուցիկ վիճակին վերադառնալու համար, երբ լարվածությունը վերանում է: Դասական օրինակ է չկաթող ներկը, որը նոսրանում է վրձնի կտրվածքի տակ, բայց արագորեն խտանում է ուղղահայաց մակերեսի վրա՝ կախվելը կանխելու համար: Մածունը և որոշ շամպուններ նույնպես ցուցաբերում են այս հատկությունը:
Հոսքի լարվածության հեղուկներ՝Այս նյութերը իրենց պահում են ինչպես պինդ մարմին՝ հանգստի վիճակում, և սկսում են հոսել միայն այն բանից հետո, երբ կիրառված սղման լարումը գերազանցում է կրիտիկական արժեքը, որը հայտնի է որպես հոսունության սահման կամ հոսունության լարում: Կետչուպը տարածված օրինակ է: Կոսմետիկայի մեջ բարձր հոսունության սահման ունեցող արտադրանքը սպառողների կողմից ընկալվում է որպես «ավելի մեծ ծավալ» և ավելի բարձր որակի զգացողություն ունեցող:
1.3 Գործընթացների արդյունավետության վրա ուղղակի ազդեցությունը
Այս հեղուկների ոչ գծային վարքագիծը խորը և հաճախ վնասակար ազդեցություն ունի ստանդարտ արտադրական գործողությունների վրա։
1.3.1 Պոմպային գործողություններ.
Կենտրոնախույս պոմպերի աշխատանքը, որոնք ամենուրեք օգտագործվում են արտադրության մեջ, զգալիորեն կախված է հեղուկի մածուցիկությունից: Պոմպի գլխիկի և ծավալային ելքը կարող են զգալիորեն «նվազել», երբ պոմպում են բարձր մածուցիկության, ոչ Նյուտոնյան հեղուկներ: Ուսումնասիրությունները ցույց են տալիս, որ խառնուրդում պինդ նյութերի պարունակության աճը կարող է հանգեցնել գլխիկի և արդյունավետության համապատասխանաբար մինչև 60% և 25% նվազման՝ խտացված խառնուրդների դեպքում: Այս նվազեցումը ստատիկ չէ. պոմպի ներսում բարձր սղման արագությունը կարող է փոխել հեղուկի ակնհայտ մածուցիկությունը, ինչը հանգեցնում է պոմպի անկանխատեսելի աշխատանքի և կայուն հոսքի բացակայության: Մածուցիկ հեղուկների բարձր դիմադրությունը նաև ավելի մեծ ճառագայթային բեռ է ստեղծում առանցքակալների վրա և խնդիրներ է առաջացնում մեխանիկական կնիքների հետ՝ մեծացնելով սարքավորումների խափանման և սպասարկման ռիսկը:
1.3.2 Խառնում և խառնում.
Խառնման բաքում կոսմետիկ հեղուկների բարձր մածուցիկությունը կարող է լրջորեն խոնավացնել խառնիչ թևից եկող հոսքը, կենտրոնացնելով կտրող և խառնող գործողությունը թևիկի շեղբի անմիջապես շրջակա փոքր տարածքում: Սա հանգեցնում է զգալի էներգիայի կորստի և խոչընդոտում է ամբողջ խմբաքանակի համասեռության հասնելը: Կտրող-նոսրացնող հեղուկների դեպքում այս ազդեցությունն ավելի է սրվում, քանի որ թևիկից հեռու գտնվող հեղուկը ցածր կտրող արագություն ունի և մնում է բարձր մածուցիկության մեջ՝ ստեղծելով «դանդաղ խառնող կղզիներ» կամ «կեղծ-քարանձավներ», որոնք պատշաճ կերպով չեն համասեռացվում: Արդյունքը բաղադրիչների անհավասար բաշխում է և անհամապատասխան վերջնական արտադրանք:
Մածուցիկության ձեռքով, ոչ աշխատանքային ռեժիմով չափման ավանդական մոտեցումը հիմնարարորեն անբավարար է այս բարդությունները կառավարելու համար: Ոչ Նյուտոնյան հեղուկի մածուցիկությունը մեկ արժեք չէ, այլ սղման արագության և, որոշ դեպքերում, սղման տևողության ֆունկցիա է: Լաբորատոր նմուշի չափման պայմանները (օրինակ՝ բաժակի մեջ որոշակի իլիկի արագությամբ և ջերմաստիճանով) չեն արտացոլում խողովակի կամ խառնման բաքի ներսում դինամիկ սղման պայմանները: Հետևաբար, ֆիքսված սղման արագությամբ և ջերմաստիճանով կատարված չափումը, հավանաբար, կապ չունի հեղուկի վարքագծի հետ դինամիկ գործընթացի ընթացքում: Երբ արտադրական թիմը հիմնվում է երկու ժամյա ինտերվալով ձեռքով ստուգումների վրա, նրանք ոչ միայն չափազանց դանդաղ են արձագանքում իրական ժամանակի գործընթացի տատանումներին, այլև իրենց որոշումները հիմնում են այնպիսի արժեքի վրա, որը կարող է ճշգրիտ չներկայացնել հեղուկի պրոցեսային վիճակը: Այս կախվածությունը թերի, ռեակտիվ տվյալներից ստեղծում է վատ վերահսկողության և բարձր գործառնական փոփոխականության պատճառահետևանքային օղակ, որը անհնար է խզել առանց նոր, նախաձեռնողական մոտեցման:

Կոսմետիկայի խառնուրդ և բլենդեր
II. Սենսորների ընտրություն և սարքավորումների ներդրում դժվար միջավայրերում
Ձեռքով մեթոդներից այն կողմ անցնելը պահանջում է հզոր, հուսալի առցանց մածուցիկաչափերի ընտրություն, որոնք կարող են ապահովել գործընթացի ներսից անընդհատ, իրական ժամանակի տվյալներ։
2.1Առցանց վիսկոմետրիա
Առցանց վիսկոմետրեր, անկախ նրանից՝ տեղադրված են անմիջապես գործընթացային գծում (գծային), թե շրջանցիկ օղակում, ապահովում են իրական ժամանակի մածուցիկության չափումներ 24/7 ռեժիմով՝ հնարավորություն տալով անընդհատ վերահսկել և մոնիթորինգ իրականացնել գործընթացում: Սա կտրուկ հակադրվում է լաբորատոր մեթոդներից դուրս, որոնք բնույթով ռեակտիվ են և կարող են գործընթացի վիճակի պատկերը տրամադրել միայն առանձին ժամանակահատվածներում: Արտադրական գծից հուսալի, անընդհատ տվյալներ ստանալու հնարավորությունը նախապայման է ավտոմատացված, փակ օղակի կառավարման համակարգ ներդնելու համար:
2.2 Վիսկոմետրի հիմնական պահանջները
Կոսմետիկ արտադրության համար վիսկոմետրի ընտրությունը պետք է առաջնորդվի արդյունաբերության եզակի բնապահպանական և գործառնական սահմանափակումներով։
Շրջակա միջավայրի և դիմացկունության սահմանափակումներ.
Բարձր ջերմաստիճան և ճնշում.Կոսմետիկ բանաձևերը հաճախ պահանջում են տաքացում մինչև որոշակի ջերմաստիճան՝ պատշաճ խառնումն ու էմուլգացիան ապահովելու համար: Ընտրված սենսորը պետք է կարողանա հուսալիորեն աշխատել մինչև 300 °C ջերմաստիճանում և մինչև 500 բար ճնշման տակ:
Կոռոզիայի դիմադրություն.Կոսմետիկայի շատ բաղադրիչներ, այդ թվում՝ մակերևութային ակտիվ նյութերը և տարբեր հավելանյութեր, ժամանակի ընթացքում կարող են քայքայիչ լինել: Սենսորի թրջվող մասերը պետք է պատրաստված լինեն բարձր դիմացկունության, կոռոզիակայուն նյութերից: 316L չժանգոտվող պողպատը ստանդարտ ընտրություն է նման միջավայրերում իր դիմացկունության համար:
Թրթռման նկատմամբ անձեռնմխելիություն.Արտադրական միջավայրերը մեխանիկորեն աղմկոտ են, պոմպերը, խառնիչները և այլ սարքավորումները առաջացնում են զգալի շրջակա միջավայրի տատանումներ: Սենսորի չափման սկզբունքը պետք է բնածին անխոցելի լինի այդ տատանումների նկատմամբ՝ տվյալների ամբողջականությունն ապահովելու համար:
2.3 Գործընթացների ինտեգրման համար մածուցիկաչափական տեխնոլոգիաների վերլուծություն
Հզոր առցանց ինտեգրման համար որոշակի տեխնոլոգիաներ ավելի հարմար են, քան մյուսները։
Տատանողական/ռեզոնանսային մածուցիկաչափերԱյս տեխնոլոգիան գործում է՝ չափելով հեղուկի մարող ազդեցությունը թրթռացող տարրի, օրինակ՝ պատառաքաղի կամ ռեզոնատորի վրա՝ մածուցիկությունը որոշելու համար: Այս սկզբունքը մի քանի հիմնական առավելություններ է առաջարկում կոսմետիկ կիրառությունների համար: Այս սենսորները շարժական մասեր չունեն, ինչը նվազագույնի է հասցնում սպասարկման անհրաժեշտությունը և նվազեցնում է ընդհանուր շահագործման ծախսերը: Լավ նախագծված դիզայնը, ինչպիսին է հավասարակշռված կոաքսիալ ռեզոնատորը, ակտիվորեն չեզոքացնում է ռեակցիայի պտտող մոմենտները և, հետևաբար, լիովին անզգայուն է տեղադրման պայմանների և արտաքին տատանումների նկատմամբ: Շրջակա միջավայրի աղմուկի նկատմամբ այս անձեռնմխելիությունը ապահովում է կայուն, կրկնվող և վերարտադրելի չափում, նույնիսկ տուրբուլենտ հոսքի կամ բարձր սղման պայմաններում: Այս սենսորները կարող են նաև չափել մածուցիկությունը չափազանց լայն միջակայքում՝ շատ ցածրից մինչև շատ բարձր մածուցիկության հեղուկներ, ինչը դրանք դարձնում է բազմակողմանի բազմազան ապրանքային պորտֆելի համար:
Ռոտացիոն և այլ տեխնոլոգիաներ՝Թեև պտտվող մածուցիկաչափերը խիստ արդյունավետ են լաբորատոր պայմաններում լրիվ հոսքի կորեր ստանալու համար, դրանց բարդությունը և շարժվող մասերի առկայությունը կարող են դժվարացնել դրանց պահպանումը գծային արդյունաբերական կիրառման մեջ: Այլ տեսակներ, ինչպիսիք են ընկնող տարրը կամ մազանոթային տեսակը, կարող են հարմար լինել որոշակի կիրառությունների համար, բայց հաճախ բախվում են սահմանափակումների ոչ Նյուտոնյան հեղուկների չափման հարցում կամ զգայուն են ջերմաստիճանի և հոսքի տատանումների նկատմամբ:
Ավտոմատացված կառավարման համակարգի հուսալիությունը ուղիղ համեմատական է դրա սենսորային մուտքային ազդանշանի հուսալիությանը: Հետևաբար, մածուցիկաչափի երկարաժամկետ կայունությունը և նվազագույն կարգաբերման պահանջները ոչ միայն հարմարավետության հատկանիշներ են, այլև կենսունակ և ցածր սպասարկման պահանջող կառավարման համակարգի հիմնարար պահանջներ: Սենսորի արժեքը պետք է դիտարկել ոչ միայն որպես սկզբնական կապիտալ ծախս, այլև որպես դրա սեփականության ընդհանուր արժեք (TCO), որը ներառում է սպասարկման և կարգաբերման հետ կապված աշխատուժը և պարապուրդի ժամանակը: Տվյալներ այնպիսի գործիքներից, ինչպիսիք են՝մազանոթային մածուցիկաչափերցույց են տալիս, որ պատշաճ մշակման և մաքրման դեպքում դրանց տրամաչափումը կարող է կայուն մնալ մեկ տասնամյակ կամ ավելի, ինչը ցույց է տալիս, որ երկարաժամկետ կայունությունը գործընթացային գործիքավորման հասանելի և կարևորագույն հատկանիշ է: Սենսորը, որը կարող է պահպանել իր տրամաչափումը երկար ժամանակահատվածում, զգալիորեն նվազեցնում է ավտոմատացման նախագծի ռիսկերը՝ վերացնելով գործընթացի հնարավոր տատանումների հիմնական աղբյուրը և հնարավորություն տալով համակարգին գործել ինքնուրույն՝ նվազագույն մարդկային միջամտությամբ:
| Տեխնոլոգիա | Գործողության սկզբունքը | Հարմարություն ոչ-Նյուտոնյան հեղուկների համար | Բարձր ջերմաստիճանի/ճնշման կարողություն | Կոռոզիայի դիմադրություն | Թրթռման նկատմամբ անձեռնմխելիություն | Սպասարկում/Կալիբրացիա |
| Թրթռացող/ռեզոնանսային | Չափում է հեղուկի մարումը թրթռացող տարրի վրա (պատառաքաղ, ռեզոնատոր): | Գերազանց (բարձր կտրվածք, վերարտադրելի ցուցմունք): | Բարձր (մինչև 300°C, 500 բար): | Գերազանց (բոլոր 316L SS թրջված մասերը): | Գերազանց (հավասարակշռված ռեզոնատորի դիզայն): | Ցածր (շարժական մասեր չկան, աղտոտվածությունը նվազագույն է): |
| Ռոտացիոն | Չափում է հեղուկի մեջ լիսեռը պտտելու համար անհրաժեշտ պտտող մոմենտը։ | Գերազանց (ապահովում է հոսքի ամբողջական կոր լաբորատոր պայմաններում): | Միջինից մինչև բարձր (տարբերվում է մոդելից կախված): | Լավ (պահանջվում են հատուկ իլիկի նյութեր): | Վատ (բարձր զգայունություն արտաքին թրթռումների նկատմամբ): | Բարձր (հաճախակի մաքրում, շարժվող մասեր): |
| Մազանոթային/դիֆերենցիալ ճնշում | Չափում է ճնշման անկումը ֆիքսված խողովակի վրա՝ հաստատուն հոսքի արագությամբ։ | Սահմանափակ (տալիս է մեկ միջին Նյուտոնյան մածուցիկություն): | Միջինից մինչև բարձր (պահանջվում է ջերմաստիճանի կայունություն): | Լավ (կախված է մազանոթի նյութից): | Միջին (հոսքից կախված, պահանջում է կայուն հոսք): | Բարձր (պահանջում է մաքրում, ենթակա է խցանման): |
| Ընկնող տարր | Չափում է տարրի հեղուկի միջով անցնելու ժամանակը։ | Սահմանափակ (տալիս է մեկ միջին Նյուտոնյան մածուցիկություն): | Միջինից մինչև բարձր (կախված է նյութերից): | Լավ (կախված է տարրի նյութից): | Միջին (զգայուն է թրթռման նկատմամբ): | Միջին (շարժվող մասեր, պահանջում է վերակարգավորում): |
2.4 Սենսորի օպտիմալ տեղադրում՝ ճշգրիտ տվյալների համար
Վիսկոմետրի ֆիզիկական տեղադրումը նույնքան կարևոր է, որքան տեխնոլոգիան ինքնին: Ճիշտ տեղադրումը ապահովում է, որ հավաքված տվյալները ներկայացուցչական լինեն գործընթացի վիճակի համար: Լավագույն փորձը պահանջում է, որ սենսորը տեղադրվի այնպիսի վայրում, որտեղ հեղուկը միատարր է, և որտեղ սենսորային տարրը միշտ լիովին ջրի տակ է: Պետք է խուսափել խողովակաշարի բարձր կետերից, որտեղ կարող են կուտակվել օդային պղպջակներ, քանի որ ներքաշված օդը կարող է խաթարել չափումները, հատկապես...տատանողական մածուցիկաչափերՆմանապես, պետք է խուսափել տեղադրումից «լճացման գոտիներում», որտեղ հեղուկը անընդհատ շարժման մեջ չէ՝ սենսորի վրա նյութական նստվածքների առաջացումը կանխելու համար: Լավ ռազմավարություն է սենսորը տեղադրել խողովակի այն հատվածում, որտեղ հոսքը կայուն է և հաստատուն, օրինակ՝ ուղղահայաց բարձրացնողում կամ հաստատուն հոսքի արագություն ունեցող տարածքում՝ կառավարման համակարգի համար առավել հուսալի տվյալներ ապահովելու համար:
III.Անխափան PLC/DCS ինտեգրում RS485-ի միջոցով
Հաջող տեղակայումըառցանց վիսկոմետրհենվում է գործող կայանի կառավարման ենթակառուցվածքի հետ իր անխափան ինտեգրման վրա: Հաղորդակցման արձանագրության և ֆիզիկական շերտի ընտրությունը ռազմավարական որոշում է, որը հավասարակշռում է հուսալիությունը, արժեքը և ժառանգական համակարգերի հետ համատեղելիությունը:
3.1 Համակարգի ճարտարապետության ակնարկ
Այս կիրառման համար ստանդարտ արդյունաբերական կառավարման ճարտարապետությունը գլխավոր-ստրուկ հարաբերությունն է: Գործարանի կենտրոնական PLC-ն կամ DCS-ը գործում է որպես «գլխավոր», սկսելով կապը մածուցիկաչափի հետ, որը գործում է որպես «ստրուկ» սարք: Ստրկական սարքը մնում է «հանգիստ» մինչև գլխավորը հարցում չստանա, որից հետո այն պատասխանում է հարցված տվյալներով: Այս մեկ-շատ հաղորդակցման մոդելը կանխում է տվյալների բախումները և պարզեցնում ցանցի կառավարումը:
3.2 RS485 կապի միջերեսը
RS485 կապի ինտերֆեյսը արդյունաբերական ավտոմատացման համար հուսալի և լայնորեն կիրառվող ստանդարտ է, մասնավորապես՝ երկար հեռավորության, բազմակետային կապ պահանջող կիրառությունների համար։
Տեխնիկական արժանիքներ՝
Երկար հեռավորության և բազմակի անկման համարRS485-ը աջակցում է տվյալների փոխանցմանը մինչև 2000 մետր հեռավորությունների վրա, ինչը այն դարձնում է իդեալական ընդարձակ արդյունաբերական օբյեկտների համար: Մեկ ավտոբուսը կարող է միացնել մինչև 30 սարք, որոնց թիվը կարող է ընդլայնվել մինչև 24/7՝ կրկնիչների միջոցով, զգալիորեն նվազեցնելով մալուխային ենթակառուցվածքների արժեքը և բարդությունը:
Ձայնի նկատմամբ անձեռնմխելիություն.RS485-ը կիրառում է հավասարակշռված, դիֆերենցիալ ազդանշանային մոտեցում՝ ոլորված զույգ մալուխի միջոցով: Այս դիզայնը ապահովում է բացառիկ անձեռնմխելիություն էլեկտրամագնիսական միջամտության (EMI) և այլ էլեկտրական աղմուկի նկատմամբ, որը տարածված խնդիր է մեծ շարժիչներով և փոխանցիչներով գործարանային միջավայրում:


3.3 PLC/DCS բացը լրացնելը
RS485-ը պարզապես տեխնիկական նախընտրություն չէ, այն ռազմավարական բիզնես որոշում է, որը զգալիորեն նվազեցնում է գործընթացների ավտոմատացման մուտքի արգելքը: Երկար հեռավորություններ անցնելու և աղմուկին դիմակայելու դրա ունակությունը այն դարձնում է իդեալական տարբերակ արդյունաբերական միջավայրերի համար, որտեղ այս գործոններն ավելի կարևոր են, քան հում հաղորդակցման արագությունը:
IV. Մոդելային ադապտիվ կառավարման տեսական ստացումը
Այս բաժինը ապահովում է խիստ մտավոր հիմք կոսմետիկ հեղուկների բարդ, ոչ գծային դինամիկան կարգավորելու ունակ կառավարման ռազմավարության համար։
4.1 Առաջադեմ կառավարման անհրաժեշտությունը
Ավանդական համամասնական-ինտեգրալ-ածանցյալ (PID) կարգավորիչները հիմնված են գործընթացի գծային մոդելների վրա և վատ հագեցած են ոչ-Նյուտոնյան հեղուկների ոչ գծային, ժամանակից կախված և փոփոխական հատկություններով վարքագծերը կարգավորելու համար: PID կարգավորիչը ռեակտիվ է. այն սպասում է սահմանված արժեքից շեղման առաջացմանը, նախքան ուղղիչ գործողություններ ձեռնարկելը: Երկար արձագանքման դինամիկա ունեցող գործընթացի համար, ինչպիսիք են մեծ խառնման բաքը կամ խտացուցիչը, սա կարող է հանգեցնել դանդաղ սխալի ուղղման, տատանումների կամ նպատակային մածուցիկության գերազանցման: Ավելին, արտաքին խանգարումները, ինչպիսիք են ջերմաստիճանի տատանումները կամ մուտքային հումքի կազմի տատանումները, կպահանջեն PID կարգավորիչի անընդհատ ձեռքով վերակարգավորում, ինչը կհանգեցնի գործընթացի անկայունության և անարդյունավետության:
4.2 Կառավարման ռեոլոգիական մոդելավորում
Ոչ-Նյուտոնյան հեղուկների հաջողակ կառավարման ռազմավարության հիմքը դրանց վարքագծի ճշգրիտ և կանխատեսող մաթեմատիկական մոդելն է։
4.2.1 Կառուցողական մոդելավորում (Առաջին սկզբունքներ):
Հերշել-Բալկլիի մոդելը հզոր կառուցվածքային հավասարում է, որն օգտագործվում է այն հեղուկների ռեոլոգիական վարքագիծը նկարագրելու համար, որոնք ցուցաբերում են և՛ հոսունության լարում, և՛ սղման նոսրացման կամ սղման խտացման բնութագրեր: Մոդելը կապում է սղման լարումը (τ) սղման արագության հետ (γ˙)՝ օգտագործելով երեք հիմնական պարամետրեր.
τ=τγ+K(γ˙)n
τγ (հոսունության լարում): Նվազագույն սղման լարումը, որը պետք է գերազանցվի, որպեսզի հեղուկը սկսի հոսել։
K (Կոնսիստենցիայի ինդեքս). մածուցիկության նման պարամետր, որը ներկայացնում է հեղուկի հոսքի դիմադրությունը։
n (Հոսքի վարքագծի ինդեքս): Հեղուկի վարքագիծը սահմանող կարևորագույն պարամետր՝ n<1՝ նոսրացման (կեղծ-պլաստիկ) համար, n>1՝ խտացման (դիլատանտ) համար և n=1՝ Բինգհեմի պլաստիկի համար։
Այս մոդելը կարգավորիչին տրամադրում է մաթեմատիկական շրջանակ՝ կանխատեսելու համար, թե ինչպես կփոխվի հեղուկի ակնհայտ մածուցիկությունը գործընթացի ներսում տարբեր սղման արագությունների դեպքում՝ ցածր սղման խառնման շրջանից մինչև պոմպի բարձր սղման միջավայրը։
4.2.2 Տվյալների վրա հիմնված մոդելավորում.
Առաջին սկզբունքների վրա հիմնված մոդելներից բացի, տվյալների վրա հիմնված մոտեցումը կարող է օգտագործվել գործընթացի մոդել կառուցելու համար, որը սովորում է առցանց մածուցիկաչափի կողմից տրամադրված իրական ժամանակի տվյալներից: Սա հատկապես օգտակար է բարդ բանաձևերի համար, որտեղ դժվար է ստանալ ճշգրիտ առաջին սկզբունքների վրա հիմնված մոդել: Տվյալների վրա հիմնված մոդելը կարող է հարմարվողականորեն կարգավորել և օպտիմալացնել սենսորային պարամետրերը իրական ժամանակում՝ հաշվի առնելով արտաքին գործոնները, ինչպիսիք են յուղի կազմի փոփոխությունները կամ ջերմաստիճանի տատանումները: Այս մոտեցումը, ինչպես ցույց է տրվել, հաջողությամբ վերահսկում է մածուցիկության չափումների միջին բացարձակ սխալը նեղ միջակայքում՝ ցուցադրելով գերազանց կատարողականություն և հուսալիություն:
4.3 Ադապտիվ կառավարման օրենքի ստացումը
Մոդելի վրա հիմնված ադապտիվ կառավարման համակարգի միջուկը դրա անընդհատ սովորելու և փոփոխվող գործընթացային պայմաններին հարմարվելու ունակությունն է: Կառավարիչը չի հիմնվում ֆիքսված պարամետրերի վրա, այլ դինամիկ կերպով թարմացնում է գործընթացի իր ներքին մոդելը:
Հիմնական սկզբունք.Ադապտիվ կարգավորիչը անընդհատ գնահատում կամ թարմացնում է իր ներքին մոդելի պարամետրերը իրական ժամանակում՝ մուտքային սենսորային տվյալների հիման վրա: Սա թույլ է տալիս կարգավորիչին «սովորել» և փոխհատուցել հումքի փոփոխությունների, սարքավորումների մաշվածության կամ շրջակա միջավայրի փոփոխությունների հետևանքով առաջացած գործընթացի տատանումները:
Կառավարման օրենքի ձևակերպում.
Մոդելի պարամետրերի գնահատում. Պարամետրերի գնահատիչը, որը հաճախ հիմնված է ռեկուրսիվ նվազագույն քառակուսիների (RLS) ալգորիթմի վրա՝ ադապտիվ մոռացման գործակցով, օգտագործում է իրական ժամանակի սենսորային տվյալները (մածուցիկություն, ջերմաստիճան, սղման արագություն)՝ մոդելի պարամետրերը, ինչպիսիք են Հերշել-Բալկլիի մոդելի K և n արժեքները, անընդհատ կարգավորելու համար: Սա «ադապտիվ» բաղադրիչն է:
Կանխատեսողական կառավարման ալգորիթմ.Այնուհետև թարմացված գործընթացի մոդելն օգտագործվում է հեղուկի ապագա վարքագիծը կանխատեսելու համար: Մոդելի կանխատեսողական կառավարման (MPC) ալգորիթմը իդեալական ռազմավարություն է այս կիրառման համար: MPC-ն կարող է միաժամանակ կառավարել բազմաթիվ մանիպուլյացված փոփոխականներ (օրինակ՝ խտացուցիչի ավելացման արագությունը և պոմպի արագությունը)՝ բազմաթիվ ելքային փոփոխականներ (օրինակ՝ մածուցիկություն և ջերմաստիճան) կառավարելու համար: MPC-ի կանխատեսողական բնույթը թույլ է տալիս հաշվարկել գործընթացը ճիշտ ուղու վրա պահելու համար անհրաժեշտ ճշգրիտ կարգավորումները, նույնիսկ երկար ժամանակային ուշացումներով՝ ապահովելով, որ հեղուկը միշտ մնա իր օպտիմալ ռեոլոգիական «պատուհանի» սահմաններում:
Պարզ հետադարձ կապի կառավարումից մոդելի վրա հիմնված ադապտիվ կառավարման անցումը ներկայացնում է հիմնարար անցում ռեակտիվից դեպի նախաձեռնողական գործընթացների կառավարում: Ավանդական PID կարգավորիչը բնույթով ռեակտիվ է, սպասելով սխալի առաջացմանը՝ նախքան գործողություններ ձեռնարկելը: Ժամանակի զգալի ուշացումներով գործընթացի համար այս ռեակցիան հաճախ շատ ուշ է լինում, ինչը հանգեցնում է գերբեռնվածությունների և տատանումների: Ադապտիվ կարգավորիչը, գործընթացի մոդելը անընդհատ սովորելով, կարող է կանխատեսել, թե ինչպես է վերին հոսքի փոփոխությունը, ինչպիսին է հումքի կազմի փոփոխությունը, ազդելու վերջնական արտադրանքի մածուցիկության վրա, նախքան շեղումը զգալի դառնա: Սա թույլ է տալիս համակարգին կատարել նախաձեռնողական, հաշվարկված ճշգրտումներ՝ ապահովելով, որ արտադրանքը մնա սահմանված պահանջներին համապատասխան և նվազագույնի հասցնի կորուստն ու փոփոխականությունը: Սա հիմնական շարժիչ ուժն է հաջող իրականացումներում փաստաթղթավորված խմբաքանակի փոփոխականության և նյութական կորուստների զանգվածային կրճատման համար:
V. Գործնական իրականացում, վավերացում և գործառնական ռազմավարություններ
Նախագծի վերջնական փուլը ինտեգրված համակարգի հաջող տեղակայումն ու երկարաժամկետ կառավարումն է: Սա պահանջում է մանրակրկիտ պլանավորում և գործառնական լավագույն փորձի պահպանում:
5.1 Տեղակայման լավագույն փորձը
Առցանց վիսկոմետրիայի և ադապտիվ կառավարման ինտեգրումը բարդ խնդիր է, որը պետք է վստահվի փորձառու համակարգային ինտեգրատորներին: Լավ սահմանված առջևի մասի դիզայնը կարևոր է, քանի որ նախագծի խնդիրների մինչև 80%-ը կարելի է հետագծել այս փուլից: Հին կառավարման համակարգերի արդիականացման ժամանակ որակավորված ինտեգրատորը կարող է ապահովել անհրաժեշտ փորձագիտությունը՝ հաղորդակցության բացերը լրացնելու և անխափան միգրացիան ապահովելու համար: Ավելին, սենսորների ճիշտ տեղադրումը չափազանց կարևոր է: Վիսկոմետրը պետք է տեղադրվի այնպիսի վայրում, որտեղ չկան օդային փուչիկներ, լճացման գոտիներ և խոշոր մասնիկներ, որոնք կարող են խանգարել չափումներին:
5.2 Տվյալների վավերացում և համաձայնեցում
Որպեսզի կառավարման համակարգը վստահելի լինի, այն տվյալները, որոնց վրա այն հիմնված է, պետք է ստուգվեն և համաձայնեցվեն: Կոշտ միջավայրերում գտնվող արդյունաբերական սենսորները ենթակա են աղմուկի, շեղման և սխալների: Կառավարման օղակը, որը կուրորեն վստահում է սենսորային հում տվյալներին, փխրուն է և հակված է թանկարժեք սխալներ թույլ տալուն:
Տվյալների վավերացում՝Այս գործընթացը ներառում է սենսորային տվյալների մշակումը՝ ապահովելու համար, որ արժեքները իմաստալից են և գտնվում են սպասվող միջակայքում: Պարզ մեթոդներից են՝ արտառոց արժեքների զտումը և որոշակի ժամանակահատվածում մի քանի չափումների միջինի հաշվարկը՝ աղմուկը նվազեցնելու համար:
Համախառն սխալի հայտնաբերում.Վիճակագրական թեստերը, ինչպիսին է խի-քառակուսի թեստը, կարող են օգտագործվել նշանակալի սխալները կամ սենսորային խափանումները հայտնաբերելու համար՝ օբյեկտիվ ֆունկցիայի արժեքը համեմատելով կրիտիկական արժեքի հետ։
Տվյալների համաձայնեցում.Սա ավելի առաջադեմ տեխնիկա է, որն օգտագործում է ավելորդ սենսորային տվյալներ և գործընթացային մոդելներ (օրինակ՝ զանգվածի պահպանում)՝ տվյալների միասնական, վիճակագրորեն վավերացված հավաքածու ստանալու համար: Այս գործընթացը մեծացնում է համակարգի նկատմամբ վստահությունը և ապահովում է ինքնագիտակցված դիմադրողականության շերտ սենսորային աննշան անկանոնությունների և խափանումների նկատմամբ:
Տվյալների վավերացման շերտի ներդրումը լրացուցիչ գործառույթ չէ. այն անհրաժեշտ մտավոր բաղադրիչ է, որը ամբողջ կառավարման համակարգը դարձնում է կայուն և վստահելի իրական աշխարհի անհամապատասխանությունների պայմաններում: Այս շերտը համակարգը պարզ ավտոմատացման գործիքից վերածում է իսկապես խելացի, ինքնամոնիթորինգի միավորի, որը կարող է պահպանել արտադրանքի որակը առանց մշտական մարդկային հսկողության:
5.3 Երկարաժամկետ սպասարկում և կայունություն
Առցանց մածուցիկաչափական համակարգի երկարաժամկետ հաջողությունը կախված է հստակ սահմանված սպասարկման ռազմավարությունից։
Սենսորի սպասարկում. Շարժական մասեր չունեցող և կոռոզիակայուն նյութերից, ինչպիսին է 316L չժանգոտվող պողպատը, ամուր վիսկոմետրերի կառուցվածքի օգտագործումը կարող է զգալիորեն մեղմել կեղտոտման հետ կապված խնդիրները և պարզեցնել սպասարկման ընթացակարգերը:
Համակարգի կալիբրացիա և վավերացում.Վիսկոմետրի երկարատև ճշգրտությունն ապահովելու համար անհրաժեշտ է կանոնավոր կարգաբերում: Բարձր ճշգրտության կիրառությունների համար հավաստագրված մածուցիկության ստանդարտներով կարգաբերումը պետք է իրականացվի ժամանակացույցով, սակայն հաճախականությունը կարող է նվազեցվել ավելի քիչ կարևոր կիրառությունների համար: Ինչպես վկայում են երկարաժամկետ կայունության ուսումնասիրությունները, որոշ տեսակի վիսկոմետրեր, ինչպիսիք են ապակե մազանոթային կամ տատանողական վիսկոմետրերը, կարող են պահպանել իրենց կարգաբերումը տարիներ շարունակ, ինչը զգալիորեն նվազեցնում է թանկարժեք կարգաբերման միջոցառումների հաճախականությունը:
AԳործող լուծումը կարող է ապահովել շոշափելի օգուտներ՝ խմբաքանակից խմբաքանակ փոփոխականության և նյութական կորուստների զգալի կրճատում, ինչպես նաև ուղի դեպի լիովին ինքնավար, ինտելեկտուալ արտադրություն։Ստաrt your opժամանակիզատիոնby խաբեությունտակտt Լոննմետer.
Հրապարակման ժամանակը. Սեպտեմբեր-09-2025







